1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
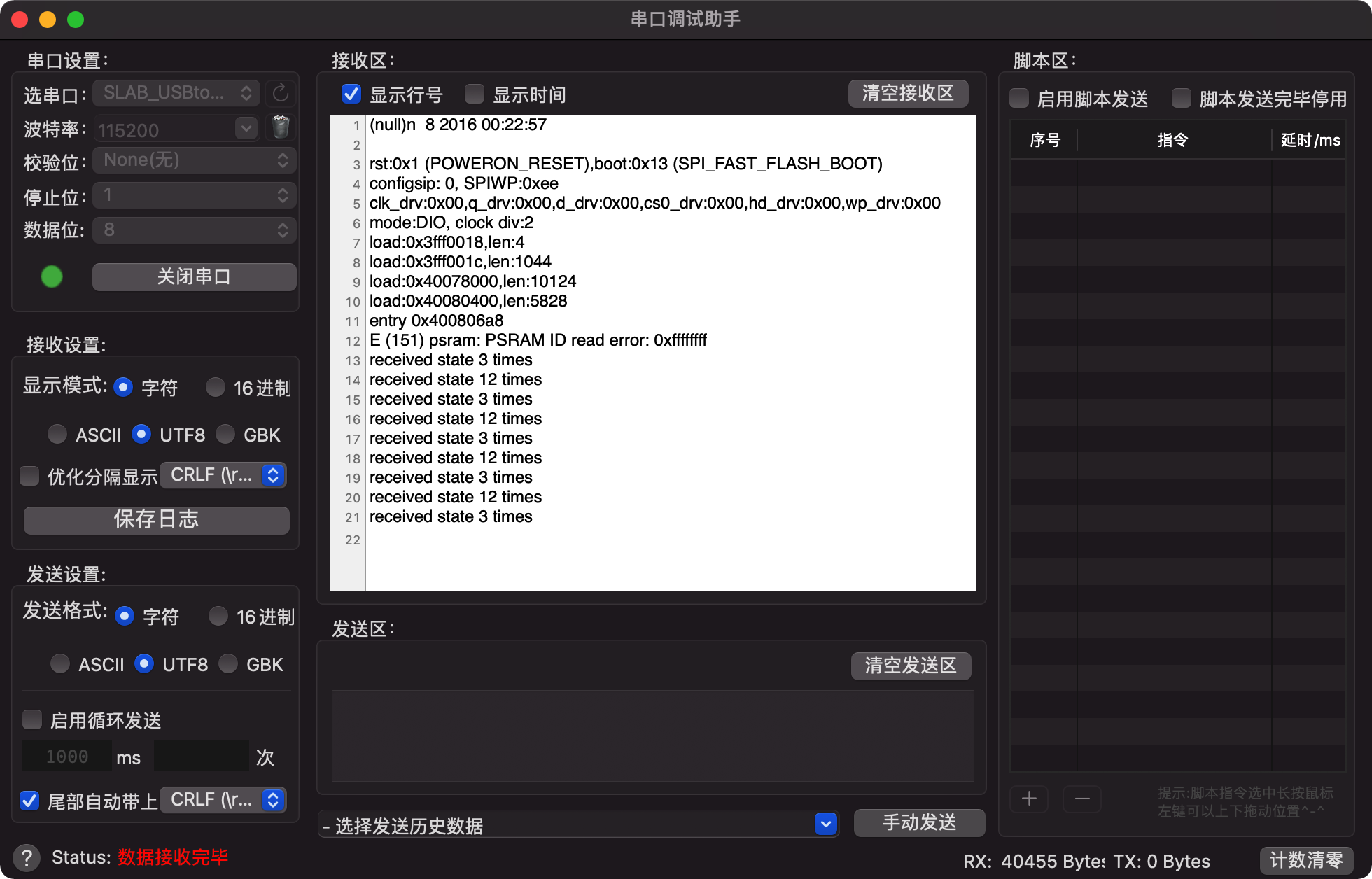
| #include <Arduino.h>
void sender(void *pvParameters);
void receiver(void *pvParameters);
TaskHandle_t receiverHandler = NULL;
void setup() {
xTaskCreate(&sender, "sender", 2048, NULL, 1, NULL);
xTaskCreate(&receiver, "receiver", 2048, NULL, 1, &receiverHandler);
}
void loop() {
}
void sender(void *pvParameters) {
for( ;; ) {
if (receiverHandler == NULL) {
vTaskDelay(1000 / portTICK_PERIOD_MS);
continue;
}
xTaskNotify(receiverHandler, (1 << 0), eSetBits);
xTaskNotify(receiverHandler, (1 << 1), eSetBits);
vTaskDelay(1000 / portTICK_PERIOD_MS);
xTaskNotify(receiverHandler, (1 << 2), eSetBits);
xTaskNotify(receiverHandler, (1 << 3), eSetBits);
vTaskDelay(1000 / portTICK_PERIOD_MS);
}
}
void receiver(void *pvParameters) {
uint32_t state;
for( ;; ) {
xTaskNotifyWait(0xffffffff, 0, &state, portMAX_DELAY);
printf("received state %d times\n", state);
}
}
|